Design and Optimisation of Soft Tactile Sensors
Research lead
Dr Pete Culmer
Research team at University of Leeds
Dr Ali Alazmani, Dr Hongbo Wang, Dr Greg de Boer, Mr Junwai Kow
Research team at Imperial College London
Dr Robert Hewson, Dr Mazdak Ghajari
Research support
Leverhulme Trust, RPG-2014-381
The development of soft sensing systems is an ongoing theme in the Healthcare Mechatronics Group to enable us to address healthcare challenges with innovative soft robotic technology.

What is a ‘Soft Sensor’?
A mechanically compliant sensor, which elastically deforms through physical interactions with the outside world, to measure physical quantities like force, pressure or topography (shape). A good example of a soft sensor is a human finger-tip, sensing haptics through a soft pad which interacts with, and conforms to, the environment.
MagOne, our magnetic-based soft tactile sensor is biocompatible, can precisely measure force in 3 degrees of freedom and costs <£5.
Why Soft?
Using compliant materials allows soft sensors to operate efficiently and safely with the environment they are trying to sense. They are particularly useful when delicate objects or interactions are required, like robotic grippers picking delicate objects or healthcare devices which interact with the human body.
Sensor Development
Our research has focused on the development of new types of soft tactile sensors, using magnetic and inductive transducers, to produce sensors which can be easily fabricated using standardised techniques, enabling them to be easily and robustly integrated into robotic systems or healthcare devices. Our early work concerned magnetic-based sensors (see video) and our current activity is focused on development of inductive-based pressure sensing arrays.
Soft Sensing Toolbox:
The soft, deformable nature of these sensors can make them difficult to characterise and calibrate – this is needed to reliably relate the measured signal(s) to a ‘real-world’ output, like force in Newtons. Here we wanted to make it easy for others to access and use our research and so we developed the Soft Sensing Toolbox, a freely available resource to help in the design, characterisation and calibration of soft sensing systems. The toolbox is in continual development to support the advancement of technology for low-cost, high precision, soft, tactile sensors.
See the Soft Sensing Toolbox website for further details and examples
Publications
Design Methodology for Magnetic Field-Based Soft Tri-Axis Tactile Sensors
Force and Topography Reconstruction Using GP and MOR for the TACTIP Soft Sensor System
A Low-cost Soft Tactile Sensing Array using 3D Hall Sensors
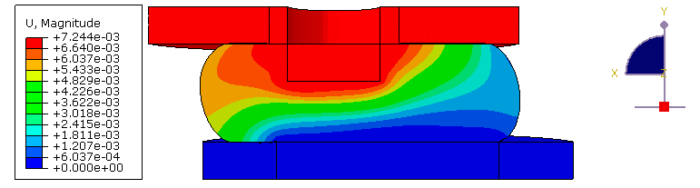
Design Optimisation of a Magnetic Field Based Soft Tactile Sensor