Painless colonoscopy for patients with Inflammatory Bowel Disease

Research lead
Professor Pietro Valdastri
Research team at University of Leeds
Dr Joseph Norton, James Martin
Research team at Vanderbilt University
Prof. Keith Obstein, Addisu Taddese, Piotr Slawinski
Research support
National Institutes of Health – R01 scheme
Engineering and Physical Sciences Research Council – SonoPill Programme Grant
We are developing a robotic platform that may provide a safer alternative to standard colonoscopy for patients with Inflammatory Bowel Disease (IBD). Patients with IBD are at increased risk for colorectal cancer and therefore surveillance has been recommended to occur at a shorter interval than that recommended for the general population. Therefore, over the course of an IBD patient’s lifetime, they are subjected to a significantly larger number of colonoscopies than their non-IBD counterparts, resulting in a more than 6-fold increase in post-procedure adverse events.
The main risks of colonoscopy are those related to procedural sedation, patient discomfort, or perforation of the colon from looping. Looping and mesenteric stretching occur due to the design of the colonoscope. Special manoeuvres can be performed to minimize looping, making colonoscopy a procedure that requires a great degree of technical skill and experience to safely perform.

Capsule endoscopy has already been extremely helpful for IBD patients, especially in the diagnosis of Crohn's disease in children and young adults. Adapting capsule endoscopy to colonoscopy – as we are proposing – would allow for reduced risk of adverse events, thus providing great benefit to patients with IBD. By using the robotic platform we are developing, the endoscopist will be able to remotely control the motion of a soft-tethered capsule to perform diagnosis and treatment at any location inside the human colon.
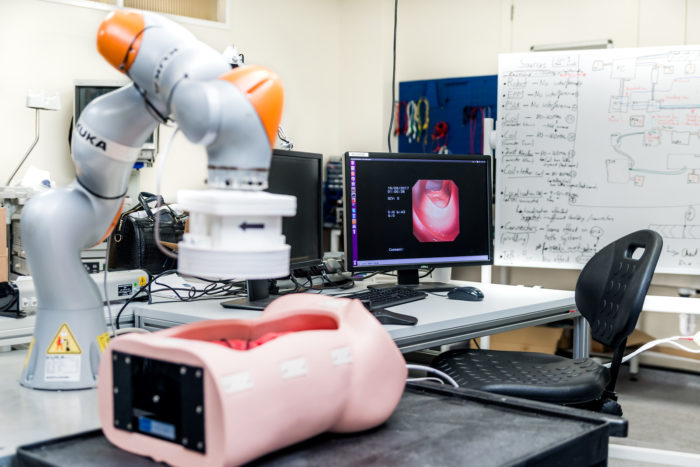
Manipulation of the capsule is achieved by magnetic coupling, thanks to the interaction of two permanent magnets – one integrated inside the capsule and the other placed at the end effector of a robotic arm. Leveraging extensive preliminary results, we are developing a fully vetted system ready for human clinical trials, with the aim of testing the hypothesis that the proposed approach has diagnostic and therapeutic capabilities comparable to standard colonoscopy, while at the same time shortening the learning curve and decreasing the trauma to the tissue. If successful, this approach will widen the implementation of IBD surveillance programs to rural areas thanks to the low cost of the platform (i.e., less than £20,000), ease of transport, no need for anaesthesiologists or sedation monitors, and no need for specialized facilities within which examinations are performed.
Relevant publications
- A. Taddese, P. Slawinski, M. Pirotta, E. De Momi, K. L. Obstein, P. Valdastri, “Enhanced Real-Time Pose Estimation for Closed-Loop Robotic Manipulation of Magnetically Actuated Capsule Endoscopes”, International Journal of Robotics Research, 2018.
- P. Slawinski, A. Taddese, K. B. Musto, S. Sarker, P. Valdastri, K. L. Obstein, “Autonomously controlled magnetic flexible endoscope for colon exploration”, Gastroenterology, 2018, Vol. 154, No. 6, pp. 1577-1579.
- Slawinski PR; Taddese AZ; Musto KB; Obstein KL; Valdastri P (2017) Autonomous Retroflexion of a Magnetic Flexible Endoscope. IEEE Robot Autom Lett, 2 (3), pp. 1352-1359.
- Di Natali C; Beccani M; Simaan N; Valdastri P (2016) Jacobian-Based Iterative Method for Magnetic Localization in Robotic Capsule Endoscopy. IEEE Transactions on Robotics, 32 (2), pp. 327-338.
- Slawinski PR; Obstein KL; Valdastri P (2015) Capsule endoscopy of the future: What's on the horizon?, World Journal of Gastroenterology, 21 (37), pp. 10528-10541.