Surgical robotic instruments based on local magnetic actuation

Research lead
Professor Pietro Valdastri
Research team at Vanderbilt University
Nicolo’ Garbin
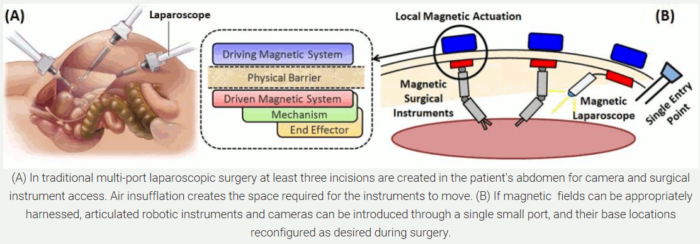
Laparoscopic surgery is widely applied to treat diseases in a less invasive manner than open surgery. This technique requires at least three dedicated incisions distributed over the abdomen. Each incision is traumatic for the patient and is a potential infection site, with high costs associated with surgical site infections. The next frontier for surgical instrument science is to further reduce invasiveness, while continuing to improve efficacy through enhanced surgical dexterity and access.
Magnetic coupling is one of the few known natural phenomena that can be harnessed to transmit motions across a physical barrier, and thereby eliminate many incisions. This approach enables multiple fully insertable surgical instruments deployed through a single tiny incision, which move around inside the abdomen without access-point constraints. However, reliable and precise control of magnetic surgical tools is challenging due to the rapid decay of magnetic field strength with distance (which is particularly significant for obese patients) and to the challenge of modelling interaction with human tissues.
In our research, we are harnessing magnetic fields using novel actuation strategies and models to create a new generation of intelligent surgical-assist devices capable of improving patient quality of life. We propose local magnetic actuation as a novel approach to transfer controlled mechanical power across a physical barrier to multiple miniature devices, operating in the confined space of the abdomen. Our strategy consists of an external driving system controlling the pose of a set of permanent magnets outside the patient, causing controlled motion of magnetically coupled surgical tools inside the patient, without direct penetrations through the abdominal wall.
In designing robotic instrument for laparoscopic surgery, Local Magnetic Actuation can enable the transfer of a larger amount of mechanical power than what is possible to achieve by embedding actuators on board. This has the concrete potential to enhance both the dexterity and the miniaturization of the robotic surgical instrument.
Video
Relevant publications
- Leong F; Mohammadi A; Tan Y; Thiruchelvam D; Valdastri P; Oetomo D Magnetic Interactions of Neighbouring Stator Sets in Multi DOF Local Electromagnetic Actuation for Robotic Abdominal Surgery IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE/RSJ International Conference on Intelligent Robots and Systems. http://eprints.whiterose.ac.uk/120024/
- Di Lorenzo N; Cenci L; Simi M; Arcudi C; Tognoni V; Gaspari AL; Valdastri P (2017) A magnetic levitation robotic camera for minimally invasive surgery: Useful for NOTES?. Surgical Endoscopy and Other Interventional Techniques, 31 (6), pp. 2529-2533. http://eprints.whiterose.ac.uk/103661/
- Garbin N; Slawinski PR; Aiello G; Karraz C; Valdastri P (2016) Laparoscopic Camera Based on an Orthogonal Magnet Arrangement. IEEE Robotics and Automation Letters, 1 (2), pp. 924-929. http://eprints.whiterose.ac.uk/103455/
- Leong F; Garbin N; Di Natali C; Mohammadi A; Thiruchelvam D; Oetomo D; Valdastri P (2016) Magnetic Surgical Instruments for Robotic Abdominal Surgery. IEEE reviews in biomedical engineering, 9 , pp. 66-78. http://eprints.whiterose.ac.uk/103451/
- Di Natali C; Buzzi J; Garbin N; Beccani M; Valdastri P (2015) Closed-loop control of local magnetic actuation for robotic surgical instruments. IEEE Transactions on Robotics, 31 (1), pp. 143-156. http://eprints.whiterose.ac.uk/103665/
- Garbin N; Di Natali C; Buzzi J; De Momi E; Valdastri P (2015) Laparoscopic tissue retractor based on local magnetic actuation. Journal of Medical Devices, Transactions of the ASME, 9 (1). http://eprints.whiterose.ac.uk/103667/