Seminar: Advanced numerical methods for the fast dynamic simulation of soft robots, Dr Weicheng Huang, Newcastle University.
- Date
- Friday 4 October 2024, 10.30 - 11.30
- Location
- Keysight Technologies LT (1.52) Elec Eng
Abstract:
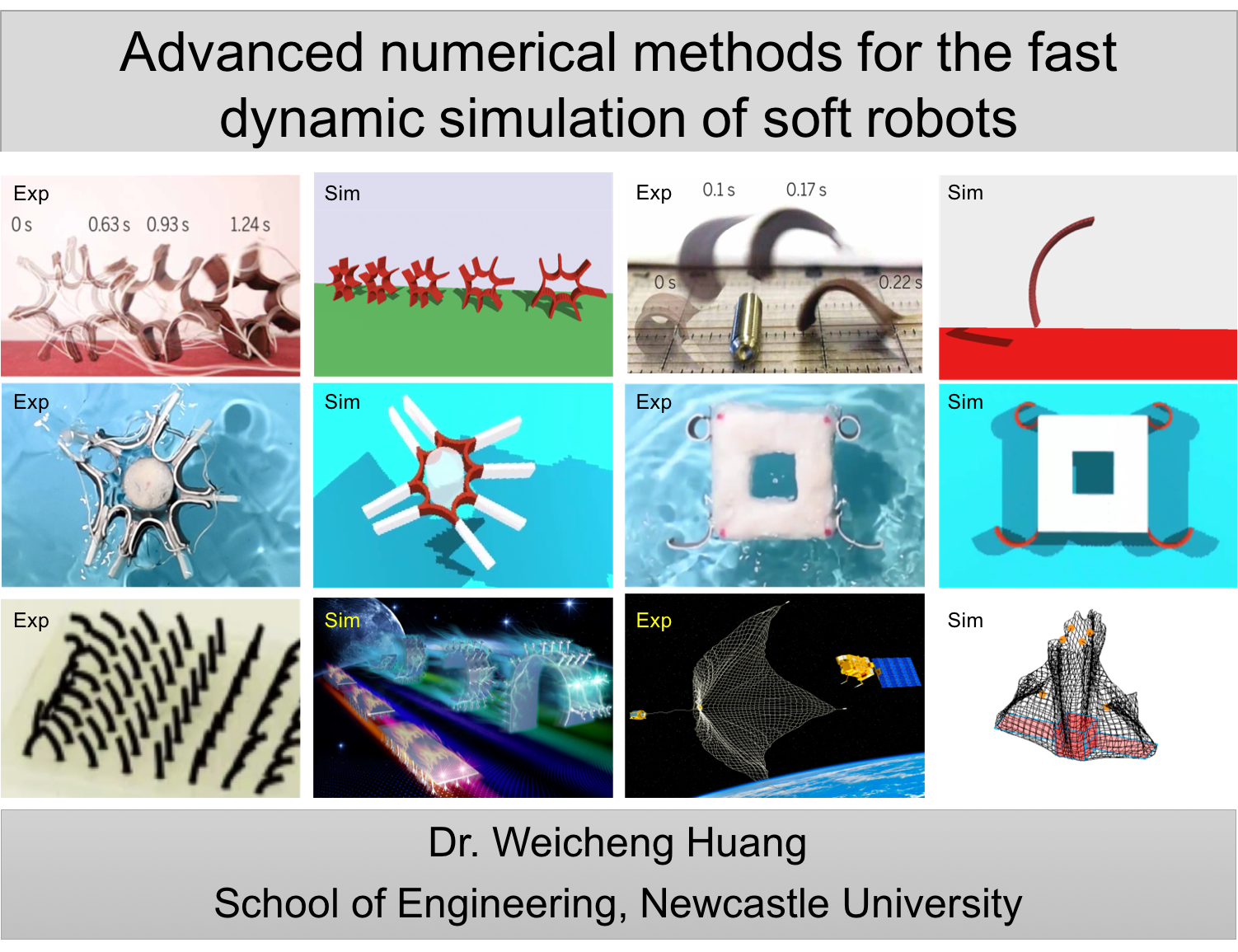
Soft robots, composed primarily of pliable materials, exhibit mechanically robust manoeuvres that surpass the capabilities of conventional rigid robotic systems. However, the design and control of these innovative robots are often hindered by current simulation limitations, necessitating laborious trial-and-error processes. This seminar will introduce state-of-the-art numerical tools designed to enhance the dynamic simulation and control of soft robots, thereby streamlining their development and operational efficiency. In particular, the seminar will focus on addressing three critical challenges inherent to soft robotic systems: managing nonlinear dynamics, facilitating interaction with complex environments, and ensuring real-time responsiveness. Through the integration of advanced simulation techniques, we aim to overcome these obstacles and unlock the full potential of soft robotics. To illustrate the practical applications and benefits of these numerical tools, we will showcase several robotic simulators. These examples include shape-memory-alloy powered soft robots, flagella-inspired robots, magnetic cilia robots, snap-jump robots, and space-tethered net robots. Each simulator will demonstrate the tools' efficiency and effectiveness in real-world scenarios, highlighting their capabilities in both evolutionary design and online control of intelligent robotic systems. The computationally efficient and robust numerical tools presented in this seminar not only serve as benchmarks for the evolutionary design of soft robots but also pave the way for their real-time control in dynamic environments. Attendees will gain insights into the latest advancements in soft robotics simulation and control, equipping them with the knowledge to push the boundaries of what is possible with these cutting-edge technologies.
Bio:
Dr. Weicheng Huang is a Lecturer in Mechanics and Robotics at the School of Engineering, Newcastle University. He received his B.Eng. degree from Tongji University, China (2013/09–2017/07), and his Ph.D. from the University of California, Los Angeles, USA (2017/09–2021/03). Before joining Newcastle University, he served as an associate professor at Southeast University, China (2021/06–2023/12). His research integrates computational mechanics, machine learning algorithms, and autonomous robotic framework to characterize, analyze, and control the mechanical properties of complex materials and structures, then enhance the performances and enrich the functionalities of soft machines, e.g., soft robots, flexible electronics, and space deployable systems. Dr. Huang has published over 40 papers in high-impact journals such as Nat. Commun., Matter, PRL, JMPS, and IJRR. He is also a member of the Early Career Editorial Board for Extreme Mechanics Letters and Soft Science.