Soft Systems
Soft Systems
Academic Contact: Ali Alazmani
Academic Staff: Dr Ali Alazmani, Prof Pete Culmer, Dr Andrew Kemp, Dr Graham Askew, Professor Abbas A. Dehghani-Sanij, Professor Robert Richardson, Professor Shane Xie
Clinical Collaborators: Osama Jaber, David Jayne, David Russel, Matthew Gardiner
Soft robotics is a new field which offer rich opportunities for conformable, low modulus, and inherently safe for humans interaction where the material properties of the system can be tuned to match that of the biological organism. Furthermore, through a combination of elegant design and simple material based control, these soft systems can be programmed to achieve complex motion seen in nature. Our research in soft robotics specialised in the following core engineering science and its application to address unmet clinical challenges:
- Modelling and Characterisation: The design stage of soft systems can be challenging due to their non-linear nature (hyperplastic material with large deformation). We have been developing comprehensive and cohesive finite element tools for a diverse range of soft materials and design parameters used in the soft robotics community. This design tool can enable the generation of improved predictive models for new and innovative soft systems.
- Soft Actuation: We are developing novel soft actuators based on pneumatic pressure and electrical current that allow us to create soft robots at different scales for healthcare technologies. Within this group of projects we investigate how to exploit advances in materials and structures to form new building blocks for soft robotics (i.e. foams, hierarchical laminates and microporous polymers). We also embed mechanical intelligence into these soft actuators to achieve required performance with simple control inputs.

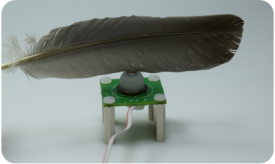
- Soft Sensing: We develop soft sensors which can be used to interrogate the force response of highly compliant materials (i.e. biological tissues) based on magnetic and/or conductance field measurements. The research combines experimental and computational strands; we are developing the sensing platform using soft robotic techniques and optimising the configuration using a range of inverse-model based optimisation techniques.
- Soft Fabrication: We develop and evaluate novel manufacturing techniques for the fabrication of soft structures with controlled and programmable properties. This will leverage the advanced manufacturing capabilities of the EPSRC National Facility for Innovative Robotic Systems at Leeds.
Case Studies
Cardiac Assist Devices
“Soft Robotic Sleeve Supports Heart Function”, Science Translational Medicine 9(373): Article number eaaf3925 18 Jan 2017 (http://eprints.whiterose.ac.uk/111341/)